

This is the first yearly report by the Dronecode community, I’m Ramón Roche Dronecode Program Manager, and I recorded the progress from the community this year with the hopes of measuring progress and build a baseline for years to come.
Comments and/or feedback on the content and style of this post would be greatly appreciated at rroche@linuxfoundation.org.
Note: This report will cover the period from January 1, 2018, to December 11, 2018, unless otherwise stated.
Who We Are
The Dronecode Project hosted under the Linux Foundation serves as the vendor-neutral home for PX4 and it’s surrounding ecosystem of projects such as MAVLink, QGroundControl, and the Dronecode SDK.
Who is contributing?
Let’s look at distribution per GitHub Project
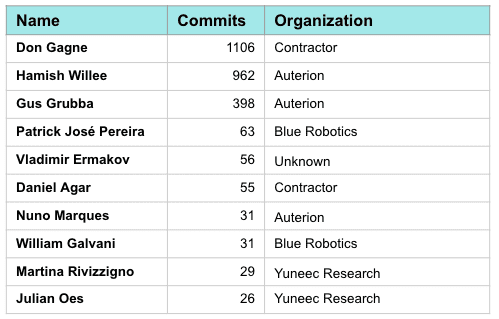
MAVLink
Top 10 Authors in MAVLink Github Org.
Dronecode
Top 10 Authors in Dronecode Github Org.

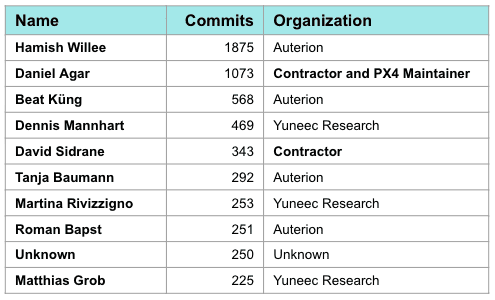
PX4
Top 10 Authors in PX4 Github Org.
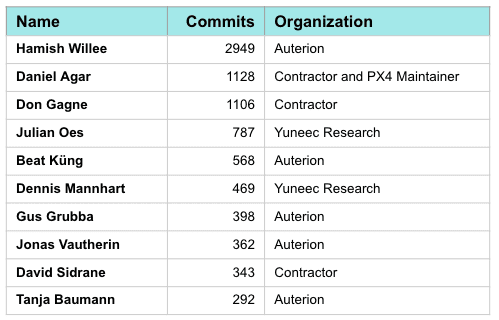
Combined Project Data
Top 10 Authors combined PX4, Dronecode, MAVLink Github Orgs.
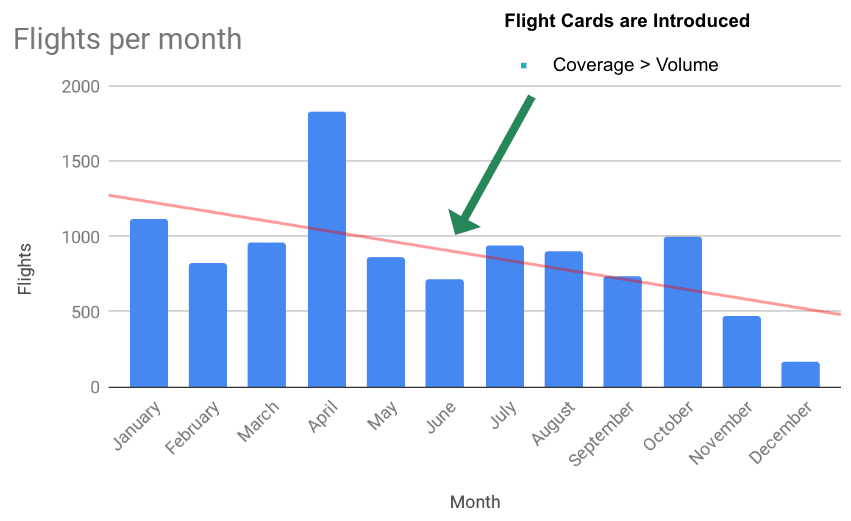
Flight Test Team
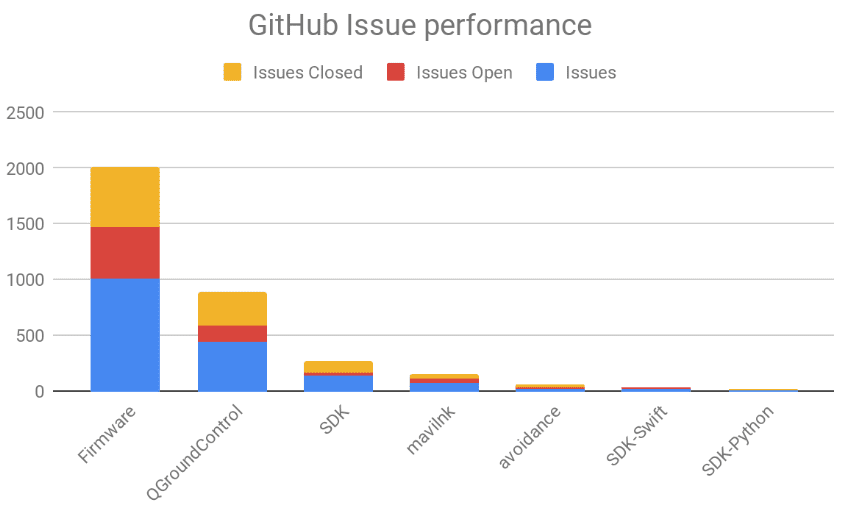
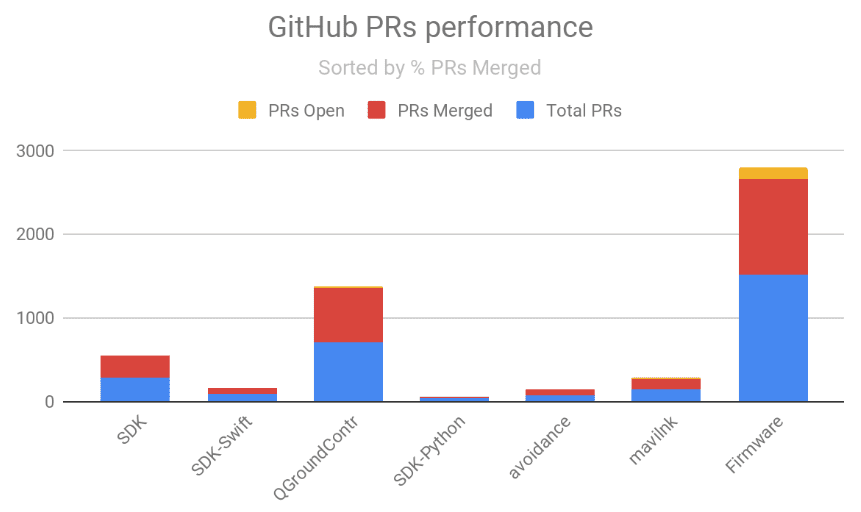
What did we accomplish?
Let’s look at releases per project
PX4
~6 Month Release Schedule
QGroundControl
~6 Month Release Schedule
DroneodeSDK
Project still in Beta, no release cadence defined yet.
MAVLink
v2 is still latest, v1 is still in use, Dev Team works through RFCs
QGC Releases in 2018
- Video recording save settings
- Parameter editor
- Joystick support for Android
- Structure Scan pattern
- Fixed Wing landing pattern
- Start/Stop video
- Multi-vehicle view support
- ADS-B vehicle support
- MAVLink console
- Log Download
QGC v3.4.0 August, the current stable version is v3.4.4 September
- Offline map increased support
- Flash autopilot firmware either PX4 or APM
- KML support
- Improved polygon support in Survey
- Corridor Scan
- Improved Fixed Wing landing pattern
- Terrain improvements
- Pre-Flight checklist
- Improved Instrument Panel
- ArduPlane support for guided commands
- High Latency Link support
- QGC, 100% translated to Chinese & Turkish
- 48% German
- 36% French
- 39% Korean
MAVLink RFCs in 2018
SDK Releases in 2018
- Serial connection support macOS
- gRPC backend (enables cross-platform builds)
- Camera action support
- Gimbal ROI support
- QGC mission import
- Follow-me improvements
SDK v0.5.0 June
- Serial connection support Windows
- gRPC backend hardening
- Improvements to build system
SDK Swift v0.2.0 November
SDK Python Unreleased*
PX4 Releases in 2018
- VIO fusion in EKF2
- Obstacle avoidance Interface
- Improved performance for racing drones
- VTOL performance improvements
- EKF2 hardening with limited GPS accuracy
- EKF2 tuning for high magnetic interference
- Wind Estimator
- Structure Scanning
- High Latency Telemetry support
- Precision landing framework
v1.9.0
Coming in:
January 2019
How did this work happen?
Distributed teams across regions and organizations
- Need community collaboration
- Need coordination
- Need official coordination channels
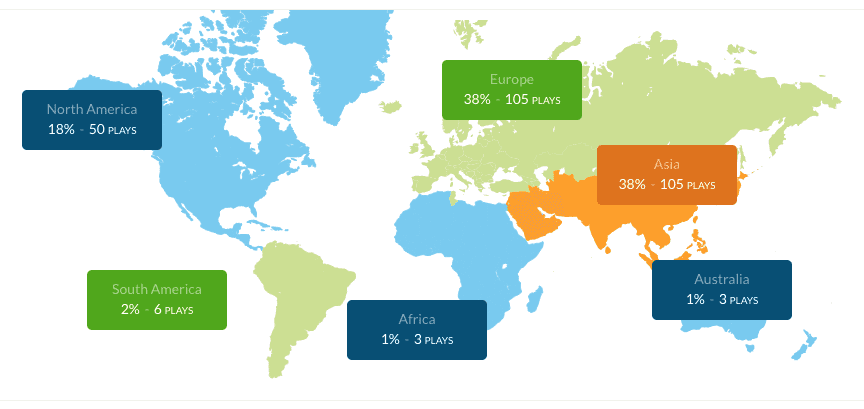
Discussion, Coordination, and Reporting

- 2,152 Participants
- 1.2k Hours in meetings
- 5 Recurring meetings
- PX4 Dev Call Weekly
- Dronecode Weekly
- MAVLink Bi-Weekly
- Avoidance Weekly
- Dronecode Board Bi-Monthly
- UAVCAN Weekly*
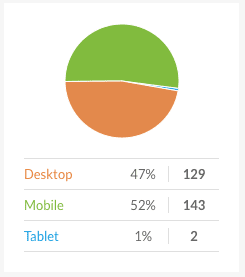
- 10 Recordings uploaded
- 274 Total Plays
- 20 Play average per episode
- 69 Most plays in a single episode

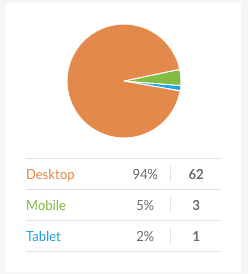
- 7 Recordings uploaded
- 66 Total Plays
- 8 Play average per episode
- 19 Most plays in a single episode

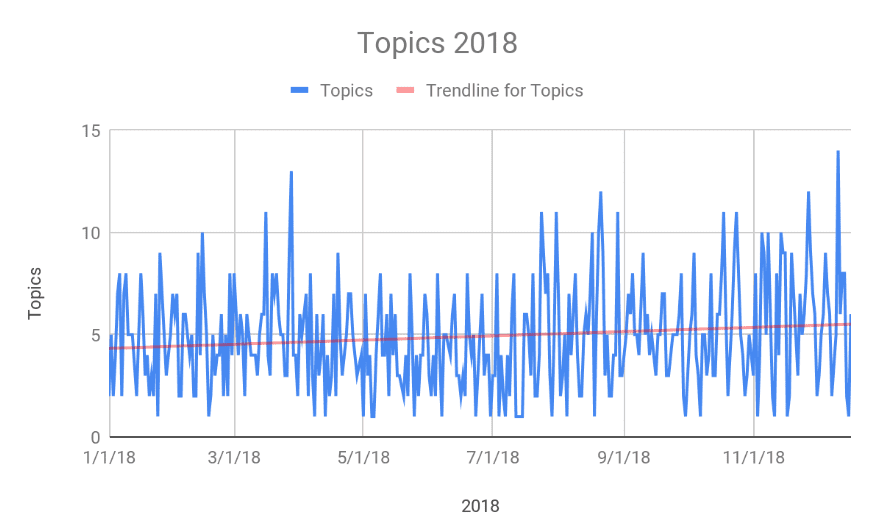
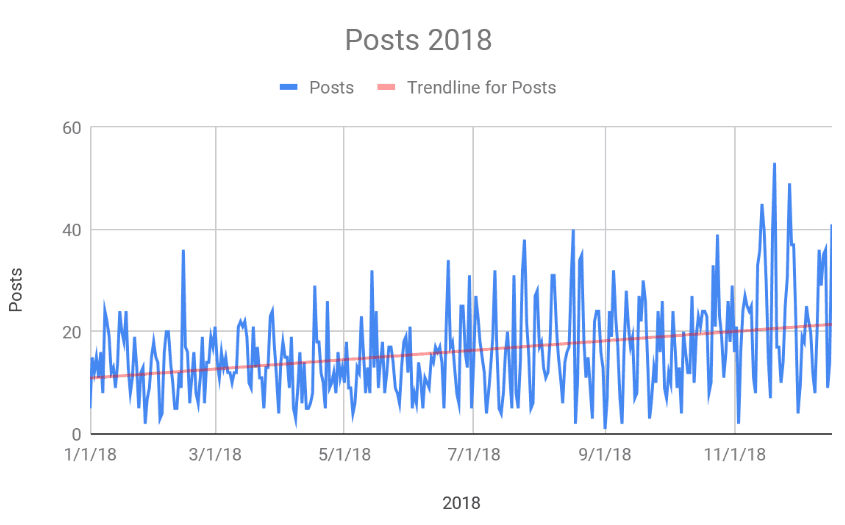
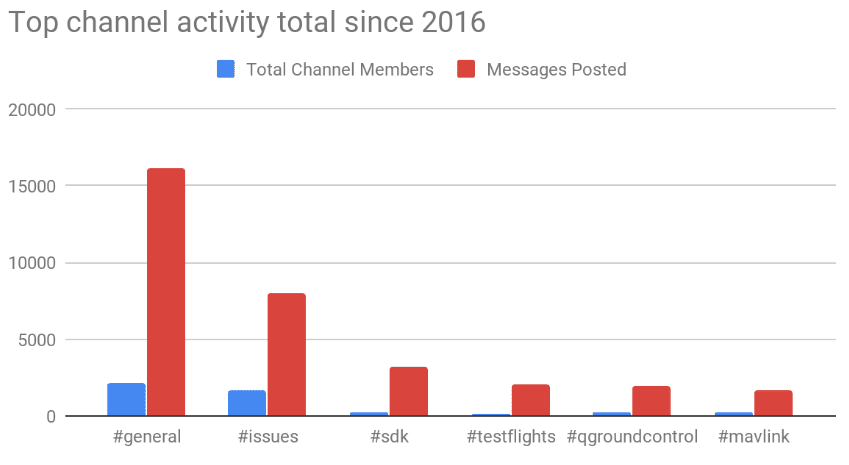
- 340 Topics (2018)
- 4,200 Topics (All-Time)
- 351 Posts (2018)
- 16,500 Posts (All-Time)
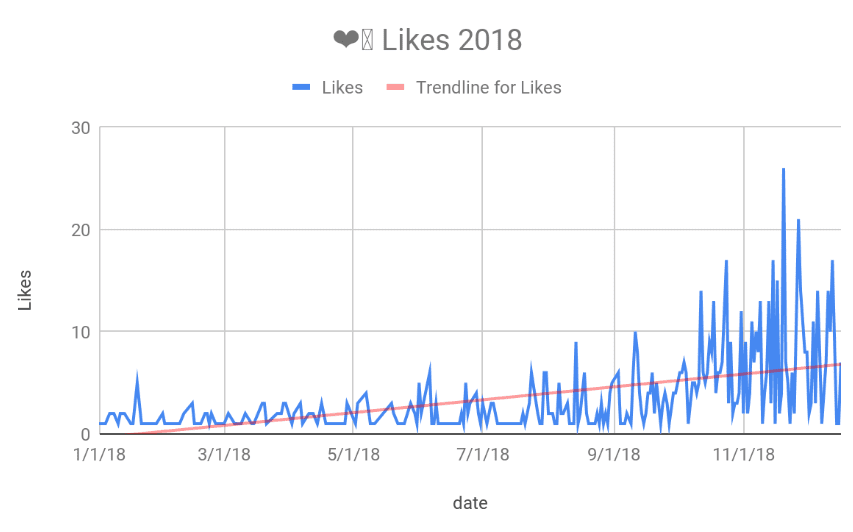
- 243 ❤️ Likes (2018)
- 1,500 Likes (All-Time)
- 1,7M Pageviews (2018)
- 3.5M Pageviews (All-Time)

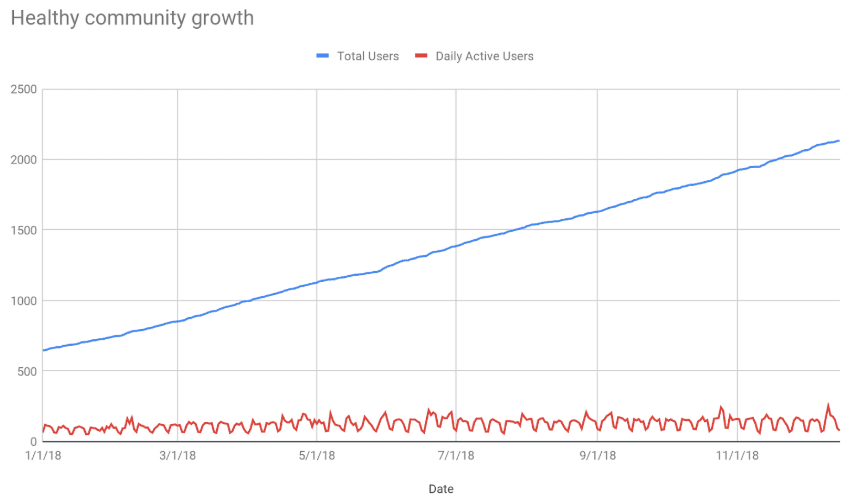
Open Sign-up
- 2,133 Users
- 53 Public channels
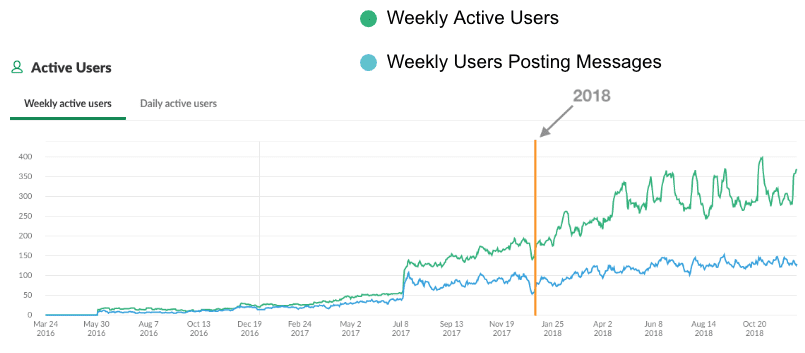
- Significantly increased activity
- 405,102 Total messages (out of 10k msg on free plan)
- 11% Sent in public channels
- 4% Sent in private channels
- 85% Sent in DMs
33.7 gb (out of 5.00gb on free plan)
Documentation
- The community actively contributes documentation
- PX4 Dev Guide
- PX4 User Guide
- QGC Dev Guide
- QGC User Guide
- MAVLink Guide
- SDK Guide (Core C++)
- Everything ends up on our docs eventually.
- We can be faster!
- PX4 User Guide
- 10% Chinese
- 15% Korean
- PX4 Dev Guide
- 11% Chinese
- QGC Dev Guide
- 99% Chinese
Community Appreciation Night 2018
- InterDrone @ Las Vegas
- 96 attendees


SDK Meetup @ Berkeley
- 3DR @ Berkeley
- 62 attendees


Community is everyone
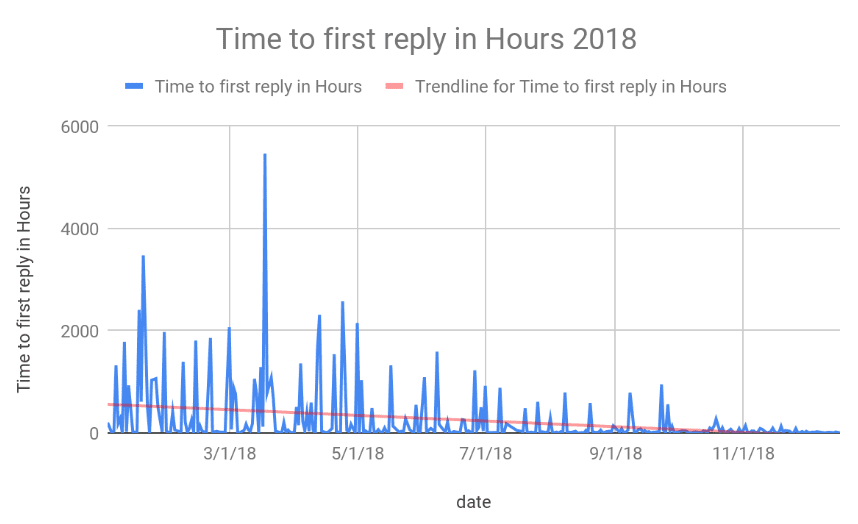
- Lots of incoming requests
- Early response and engagement is key
- Most contributions are a result of early collaboration
- CI uploads logs here
- Flight Team uploads logs here
- Anyone can upload logs both publicly or privately (not indexable)
- An invaluable tool for support, it’s now policy to ask for a link to your logs!
- Usage guide is available on the PX4 user guide.
- Open Source

Top blockers / Issues in 2018
- No clear Dronecode definition, what is it?
- No clarity on branding (where does PX4 end & DC begin?)
- Individuals & Organizations don’t know how to collaborate
- China strategy still nascent
- Still need to put more work into architecture (SDK, API, etc) vs features, to encourage expansion
- Per project governance issues
- Projects are getting hard to maintain (firehose of information)
- Full-time team of 1
What worked well in 2018
- Face to face meetings are a great way to reduce communication barriers
- Work hand in hand with organizations
- Weekly coordination calls help us keep track of progress
- Auterion’s success heavily influenced developer and membership acquisition
- Software Architecture work pays off
- Low but organized activity is better than high unorganized activity
- Documentation as a source of truth
Who funded Dronecode in 2018?
Silver

Gold
We need your help in 2019
Contributions are always welcomed, from Issue triaging, Forum hunting, Slack lurking or fixing typos in our docs, we need your help next year to reach our goals:
- Maintain the size of our core developer base
- Grow our collaborator base

