
CUAV Pixhawk V6X
Build, Launch, and Soar with Dronecode
The infrastructure ecosystem for the development of autonomous aerial robotics.
Join DronecodeMake It Great with Dronecode
Leverage the power of the open source ecosystem and find out how to get started with a Dronecode project that matches your ambitions.
Products Enabled by Dronecode, built with open source.
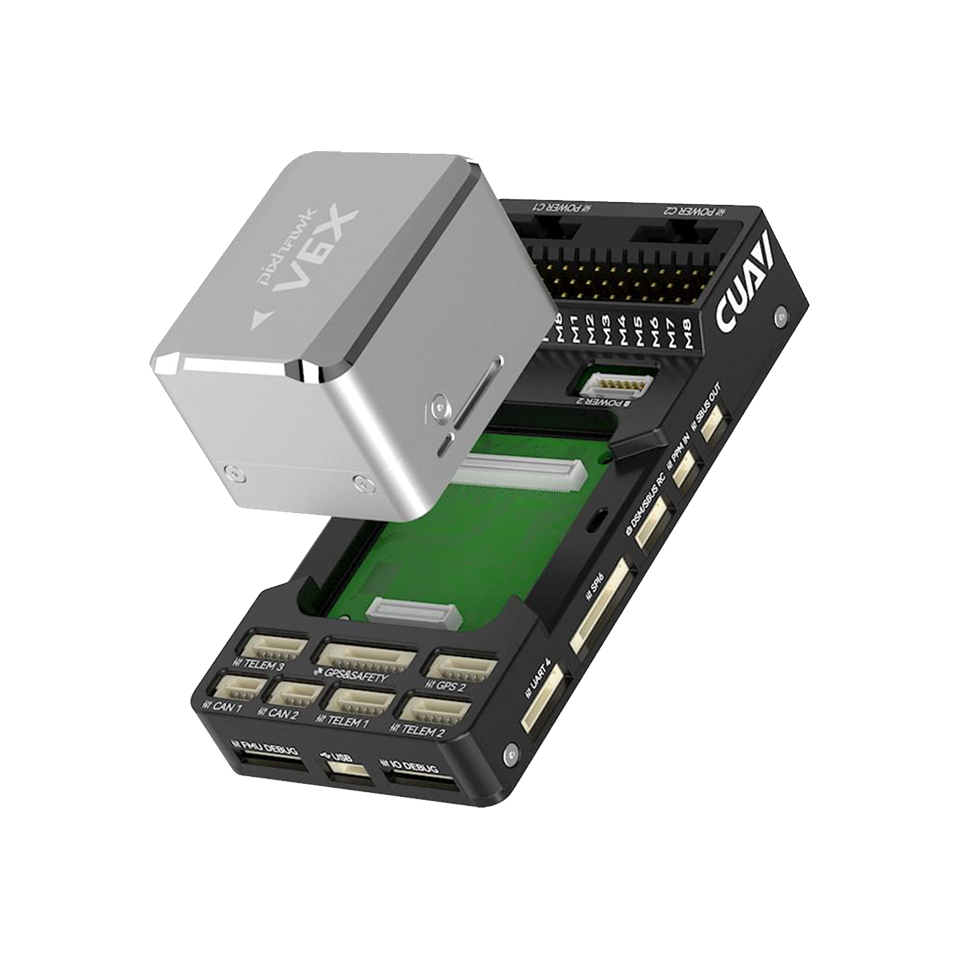
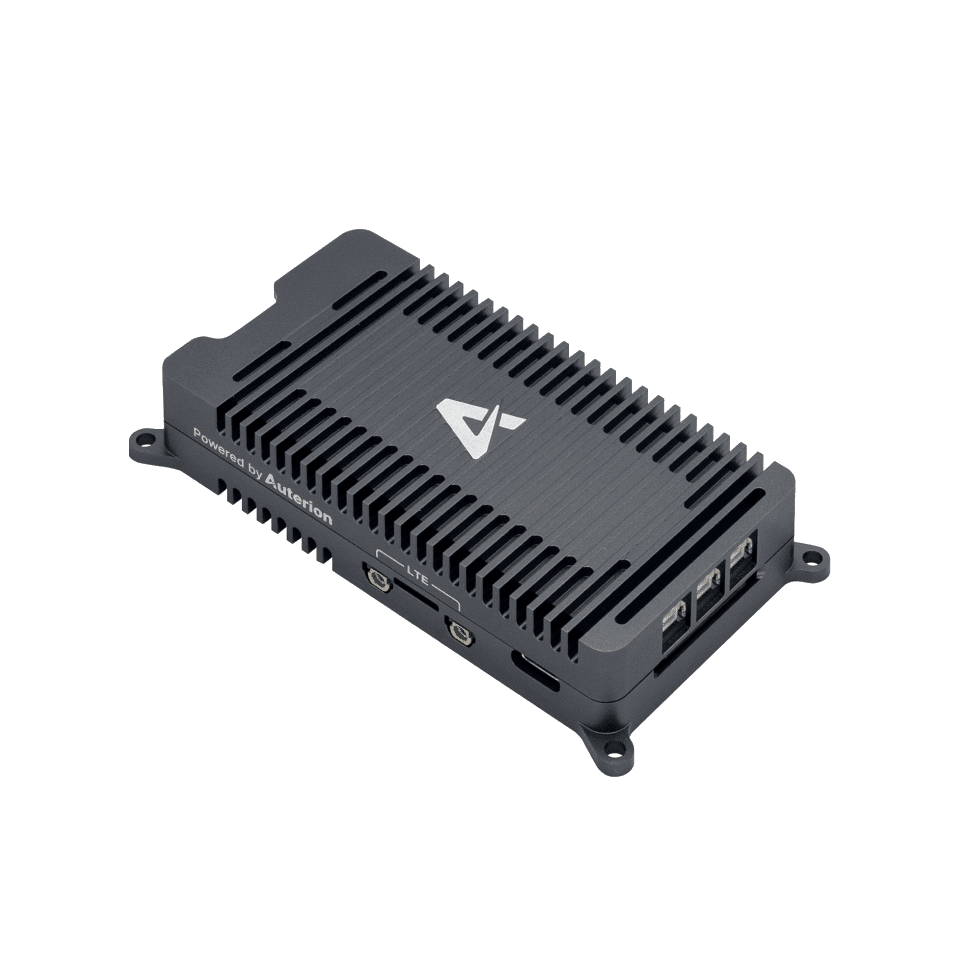
Auterion Skynode X
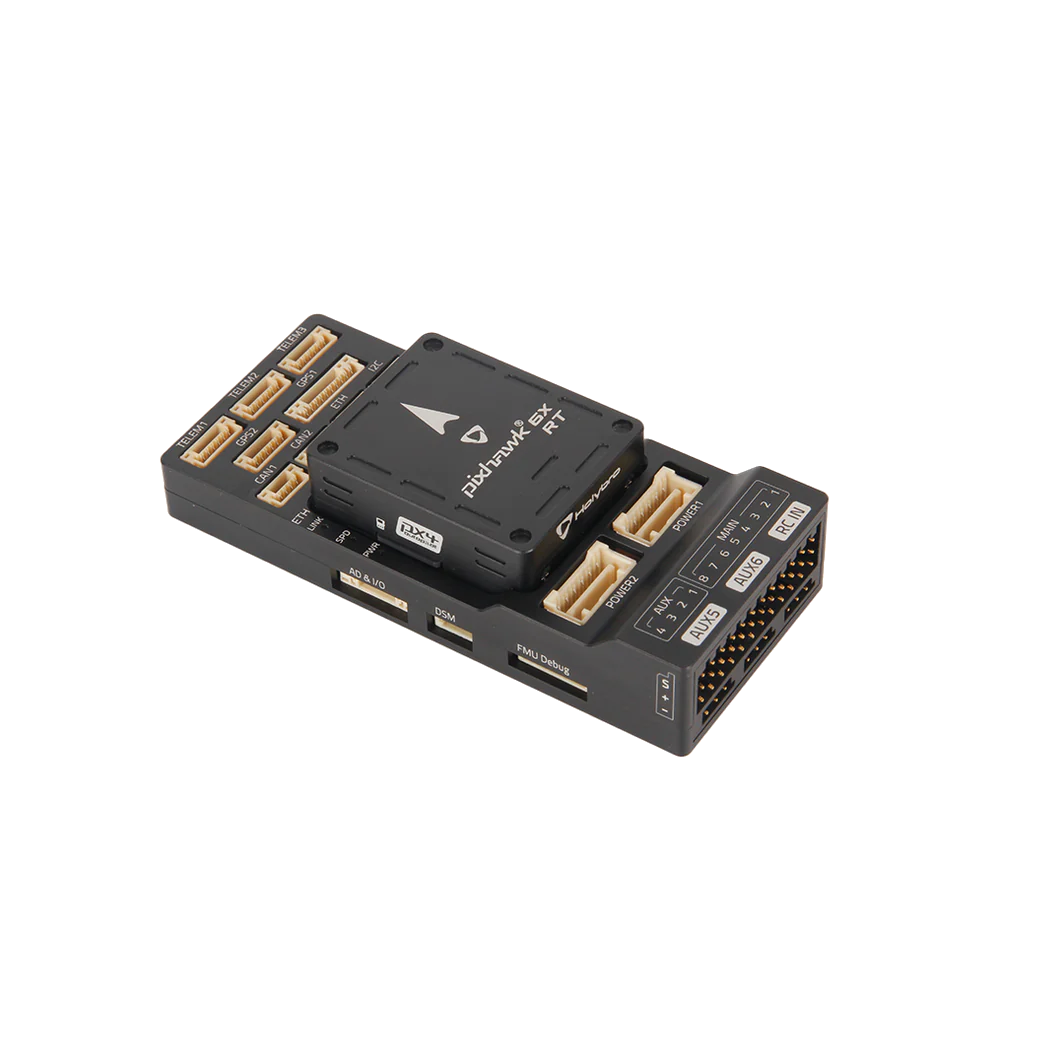
Holybro Pixhawk 6X-RT
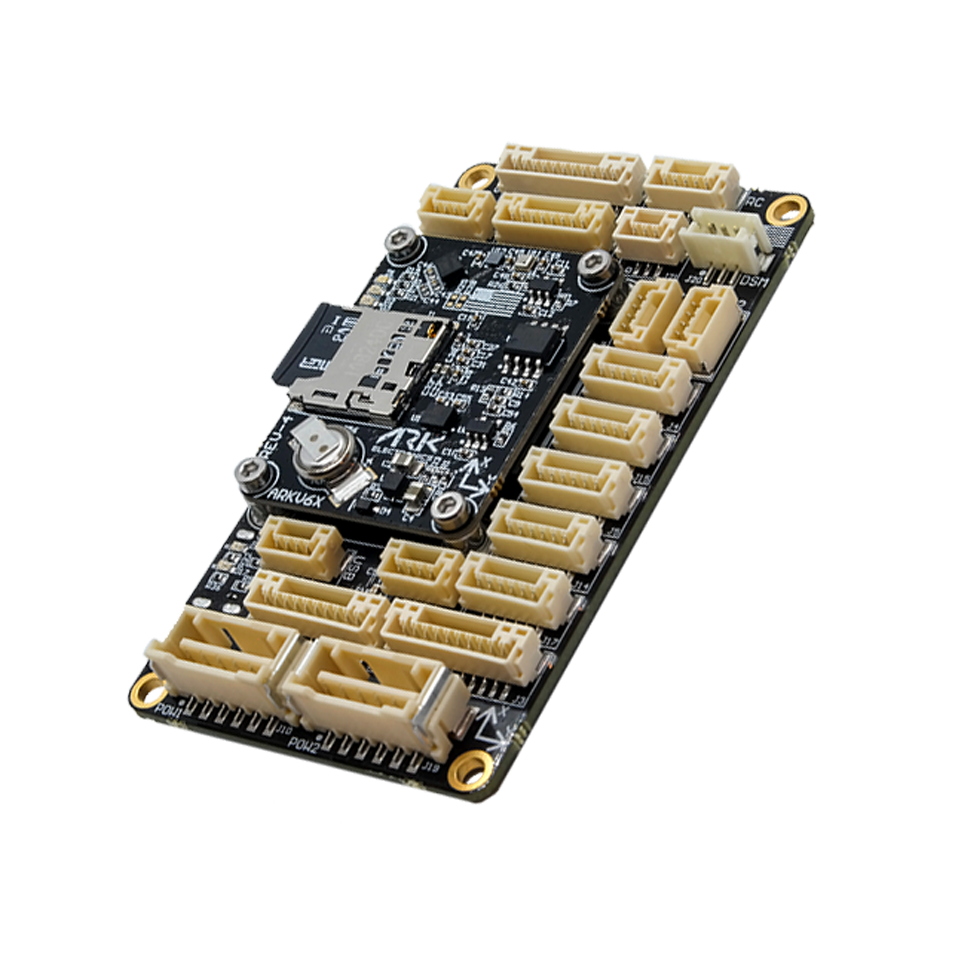
ARK V6X Flight Controller

ModalAI Starling 2

Holybro PX4 Developer Kit v2

FreeFly Astro

UVify IFO
and many more...
Latest Releases
PX4 v1.16 Stable Release
PX4 v1.16 reimagines rover support with dedicated firmware for Ackermann, differential, and mecanum drive types, all built on the same pure-pursuit guidance library for smooth, reliable path following. Simulation gets a major stability boost with the move to Gazebo Harmonic LTS, and flight controllers can now take advantage of bidirectional DShot for real-time motor feedback. Developers will benefit from the new ROS 2 Message Translation Node for handling message versioning on the fly, as well as built-in log encryption that stores keys alongside the log file for better security. Add in new sensor drivers, expanded hardware support, and improvements across control, estimation, and safety systems, and you have a release that delivers both big features and solid polish. Thanks to every contributor, tester, and community member who made v1.16 possible.
Dronecode Foundation Members
”ARK Electronics officially joined Dronecode in 2023 after many years of working with the community. Participating in open standards committees and PX4 firmware development has enabled us to grow and support drone manufacturers in the USA and around the world. We look forward to continued collaboration and seeing where open source can take the drone industry.
Alex KlimajCEO & Founder
Platinum Members
Silver Members
![]()

![]()





![]()
![]()
![]()

![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
Join the Dronecode Foundation as a member and play a key role in shaping the future of aerial robotics.
Join DronecodeNews
Dronecode Welcomes Utmtek as a Silver Member
The Dronecode Foundation is delighted to announce that Shenzen UTMTEK Technology Co., Ltd has joined as a Silver Member. With their innovative edge-computing flight controllers and comprehensive UAV management solutions,…
Read More
5 PX4 Developer Summit Session Picks from the Program Committee
The PX4 Developer Summit 2025’s program has dropped, and it’s packed with amazing speakers covering the most important topics in open source aerial robotics. This year’s lineup covers deep technical…
Read More


